Our paper “Occlusion-Free Conformal Lensing for Spatiotemporal Visualization in 3D Urban Analytics” has been accepted to IEEE VR 2026 (TVCG track)! The conference will take place in Daegu, Korea in March 2026.
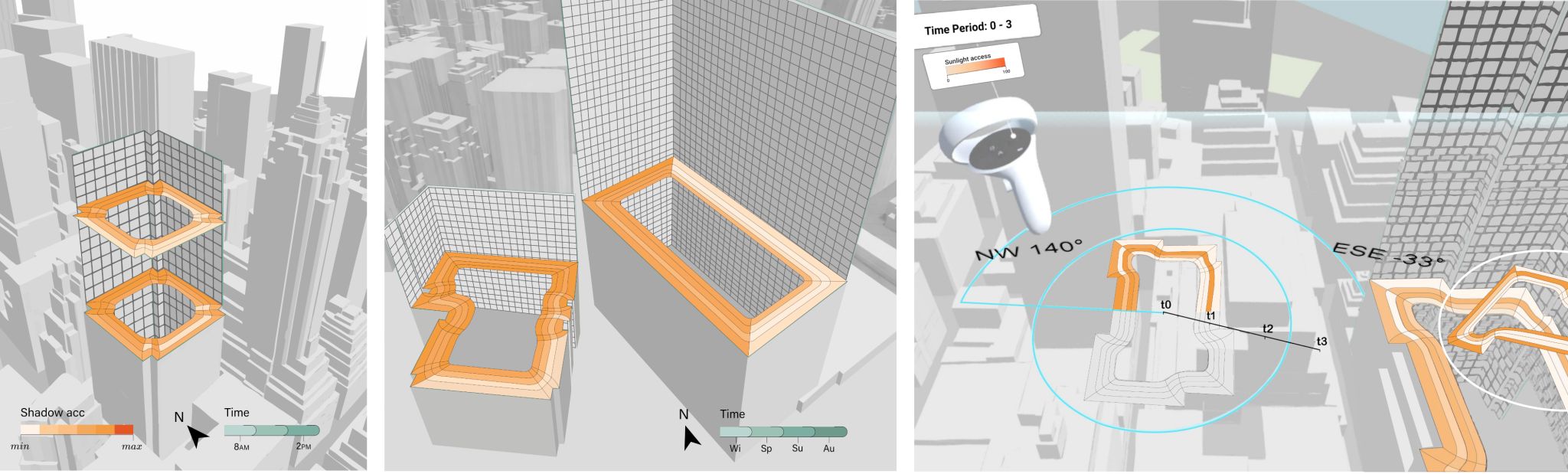
This work presents the design of an immersive lens visualization to support time-varying building data analysis by mitigating self-occlusion and clutter in 3D urban analytics. This lens integrates a view-dependent cutaway for de-occlusion and a temporal display derived from the conformal mapping algorithm and embedded within the building.
The work was led by Roberta Mota, Ph.D. and was a collaboration effort involving University of Calgary (Canada), University of Illinois Chicago (USA) and Universidade Federal de Pernambuco (Brazil).
Preprint: https://arxiv.org/abs/2602.03743